04_Verhaltensentscheidung und Trajektorienplanung
Motivation und Stand der Forschung
Eine zentrale Aufgabe für automatische Fahrzeuge ist die Planung ihrer Trajektorie – d. h. ihrer Positionen und Geschwindigkeiten – für die nächsten Sekunden. Eine möglichst präzise Vorhersage und Berücksichtigung des Verhaltens anderer Verkehrsteilnehmer im Kontext der eigenen Planungen bietet hierbei große Potentiale hinsichtlich Sicherheit, effizientem Verkehrsfluss und Komfort.
Der Stand der Forschung muss hier noch Kompromisse eingehen: Zwar ist die Erkennung anderer Verkehrsteilnehmer schon weit fortgeschritten; für eine zuverlässige Vorhersage über die nächsten Sekunden müssen diese jedoch zusätzlich zur statischen Verkehrssituation (Fahrstreifen, Vorfahrtsregeln) in Beziehung gesetzt und deren Interaktion mit anderen Verkehrsteilnehmern modelliert werden. Für jeden Verkehrsteilnehmer kommt nun eine Vielzahl von Trajektorien in Betracht, die sich nicht nur in Parametern wie Geschwindigkeit unterscheiden, sondern auch strukturell – etwa bei der Entscheidung, ob ein Fußgänger eine Straße überqueren wird. Aus Rechenzeitgründen müssen sich heutige Fahrzeuge bei der Planung ihres eigenen Verhaltens für die nächsten Sekunden auf je eine Trajektorie pro anderem Verkehrsteilnehmer beschränken. Diese bildet sinnvollerweise dessen typisches Verhalten ab, weshalb jedoch auf ungewohntes oder regelwidriges Fahrverhalten erst spät reagiert werden kann.
Verbesserungen durch logisch-probabilistische Modellierung
Das FZI Forschungszentrum Informatik wird den o. g. Herausforderungen durch die Umsetzung folgender Aspekte bei der Trajektorienplanung begegnen:
- Bei der Erkennung der relevanten Interaktionen (Abstände, Vorfahrt, Verhaltensentscheidung und Trajektorienplanung zwischen Verkehrsteilnehmern knüpfen wir an das Teilprojekt „Durchgängige probabilistische Situationsinterpretation und Manöverplanung“ an.
- Mittels hybrider logisch-probabilistischer Ansätze wird nun in Echtzeit eine Vielzahl möglicher Trajektorien pro Verkehrsteilnehmer (statt nur der typischsten) generiert und einbezogen. Ebenso wird die Vielzahl von Handlungsmöglichkeiten des eigenen Fahrzeugs aufgespannt und die günstigste Trajektorie darin ausgewählt.
- Die explizite Einbeziehung der Interaktion zwischen dem automatischen Fahrzeug und anderen Verkehrsteilnehmern ermöglicht eine Rückkopplung von deren Verhalten, beispielsweise ein gegenseitiges Platzmachen in engen Gassen.
Trajektorien, welche ein automatisches Fahrzeug auf dieser Grundlage plant, werden nicht nur kollisionsfrei und regelkonform, sondern auch sicher, effizient und aus der Sicht menschlicher Verkehrsteilnehmer kooperativ und „natürlich“ sein.
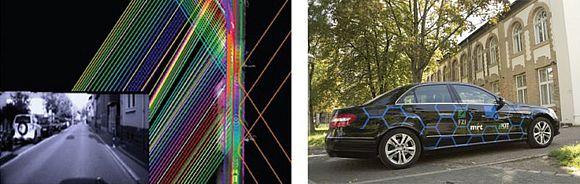
Abb 1: Statische Hindernisse, Vorhersage eines entgegenkommenden Fahrzeugs und geplante eigene Trajektorie bei der Bertha-Benz-Fahrt 2013
Abb 2: Automatisches Versuchsfahrzeug „BerthaOne“
Laufzeit:
- 09.2015 - 12.2018
Tech Center a-drive Partner:
FZI Forschungszentrum Informatik - Abteilung Mobile Perception Systems
FZI Forschungszentrum Informatik - Abteilung Technisch-Kognitive Assistenzsysteme