03_Durchgängige probabilistische Situationsinterpretation und Manöverplanung
Im Rahmen des Projekts soll eine Inferenz-Kette, ausgehend von der unsicherheitsbehafteten Objekterkennung über die Interpretation erkannter Objekte und Modellierung von Situationen bis hin zu einer semantischen Planungsebene aufgebaut werden. Hierzu werden Verfahren untersucht, die eine durchgängige Berücksichtigung von Unschärfe und Unsicherheit erlauben.
Motivation und Stand der Forschung
Die Fähigkeit, die aktuelle Situation zu verstehen und zu antizipieren, erlaubt einem automatischen Fahrzeug, sich sicher und nachvollziehbar im Verkehrsgeschehen zu bewegen. Der derzeitige Stand der Forschung liegt in der fahrzeugindividuell ausgeführten Erkennung der aktuellen Situation auf Basis des Fahrzeugumfelds. Den bekannten Verfahren ist gemeinsam, dass sie bisher vornehmlich auf einzelne, isolierte Szenarien und Aufgabenstellungen optimiert sind. Auch reicht die Robustheit und Zuverlässigkeit der bekannten Methoden zur Handlungs- und Manöverprädiktion in vielen Szenarien noch nicht aus. Im Rahmen des Tech Center a-drive wird daher an dieser Themenstellung intensiv weitergearbeitet.
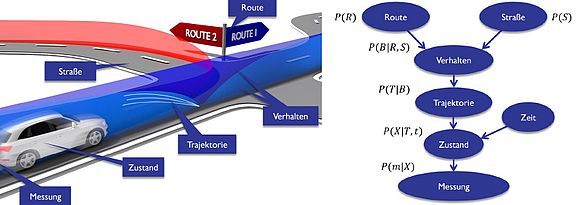
Abb: Betrachtung von Hierarchieebenen zur Verhaltensentscheidung für eine sichere Prädiktion in komplexen Situationen mit langem Vorausschauhorizont
Verbesserung mittels durchgängiger probabilistischer Interpretation und Planung
Ziel ist die Entwicklung generischer, formaler Konzepte zur durchgängigen probabilistischen Analyse und Beschreibung von Situationen zur Ableitung eines möglichst präzisen Vorhersagehorizontes. Darauf aufbauend sollen Methoden zur robusten Verhaltensentscheidung erforscht werden. Kernaspekte sind dabei:
- die Abbildung von realen Szenarien auf geeignete Beschreibungen sowie das Erstellen und die Parametrisierung der Inferenzmodelle durch Methoden der statistisch relationalen Inferenz und des maschinellen Lernens,
- die Erarbeitung geeigneter Inferenzmethoden zum Schließen von Wissen über aktuelle und zukünftige Situationen aus Evidenzen über erkannte Objekte,
- die explizite Beschreibung impliziter Zusammenhänge wie Relevanz, Verhalten oder Interaktionen von Verkehrsteilnehmern im Verkehrsgeschehen,
- die formale Beschreibung eines prädiktiven Manöverplanungsraums und die Ableitung von Planungsverfahren zur Generierung von Manöverketten.
Durch diese durchgängige probabilistische Situationsinterpretation kann der Vorhersagehorizont präzisiert und erweitert werden, sodass auch in komplexen Situationen eine robuste Verhaltensentscheidung durch das Fahrzeug getroffen werden kann.
Laufzeit:
- 09.2015 - 12.2018
Tech Center a-drive Partner:
FZI Forschungszentrum Informatik - Abteilung Mobile Perception Systems
FZI Forschungszentrum Informatik - Abteilung Technisch-Kognitive Assistenzsysteme